Title
Getting into the Robotics with Robotic Manipulators
Learn the fundamentals of robotics over robotic manipulators and how to apply theory into real world situations.

What you will learn
Understand the fundamentals of robotics
Apply the theoretical concepts into real tasks
Identify the problems needed to be solved in a given robotic task
Develop solutions based on the learned concepts for the identified problems
Why take this course?
🤖 Getting into Robotics with Robotic Manipulators 🚀
Course Headline: 🎓 Learn the fundamentals of robotics over robotic manipulators and how to apply theory into real-world situations.
Course Description:
Are you fascinated by the world of robotics but unsure where to begin your journey? The endless sea of books, tutorials, and forums can be overwhelming. But fear not! "Getting into Robotics with Robotic Manipulators" is meticulously crafted to guide you through the essential fundamentals of robotics in a logical and systematic order.
Why This Course?
- Sequential Learning: Each concept builds on the previous one, ensuring a clear understanding from the ground up.
- Theoretical Foundation: While many resources skip straight to coding, this course emphasizes a strong theoretical foundation—because understanding the 'why' helps in solving real-world problems.
- Practical Application: To complement theory with practice, this course includes hands-on coding and simulation sessions.
- Real-World Skills: Acquire skills that are directly applicable to real-world robotic manipulators.
What You Will Learn:
📚 3D Rigid Body Dynamics
- Rotation representations
- Homogeneous transformation matrices
🔁 Kinematics of Robot Manipulators
- Forward kinematics using the Denavit-Hartenberg (DH) convention
- Velocity kinematics, geometrical and analytical Jacobians
- Singularities and inverse kinematics
💡 Dynamic Modeling
- Euler-Lagrange method for dynamic modeling
⚫️ Trajectory Generation
- Polynomial trajectories
- Trapezoidal trajectories
- Kinematic and dynamic scaling of trajectories
🎮 Control Techniques
- Proportional-Derivative (PD) control with gravity compensation
- Inverse dynamics control
- Robust and adaptive control strategies
👋 Force and Hybrid Control Techniques
- Stiffness and compliance control
- Impedance control
- Hybrid force/position control techniques for manipulators in contact with the environment
Prerequisites:
Before diving into robotics, it's beneficial to have a grasp of:
- Linear Algebra
- Control Theory
- 3D Dynamics
Don't worry if you're missing some pieces of the puzzle—we've got you covered! A 'Resources' file will be provided at the start, guiding you to the right tools and learning materials to fill in any gaps.
Join the Journey:
Embark on your robotics adventure today! With "Getting into Robotics with Robotic Manipulators," you'll gain a solid understanding of the field, from theoretical principles to practical applications. Whether you're aiming for academic excellence or seeking to innovate in industry, this course is your stepping stone to a future in robotics.
🎓 Enroll now and let's build your foundation in the exciting world of robotics! 🚀
Screenshots




Our review
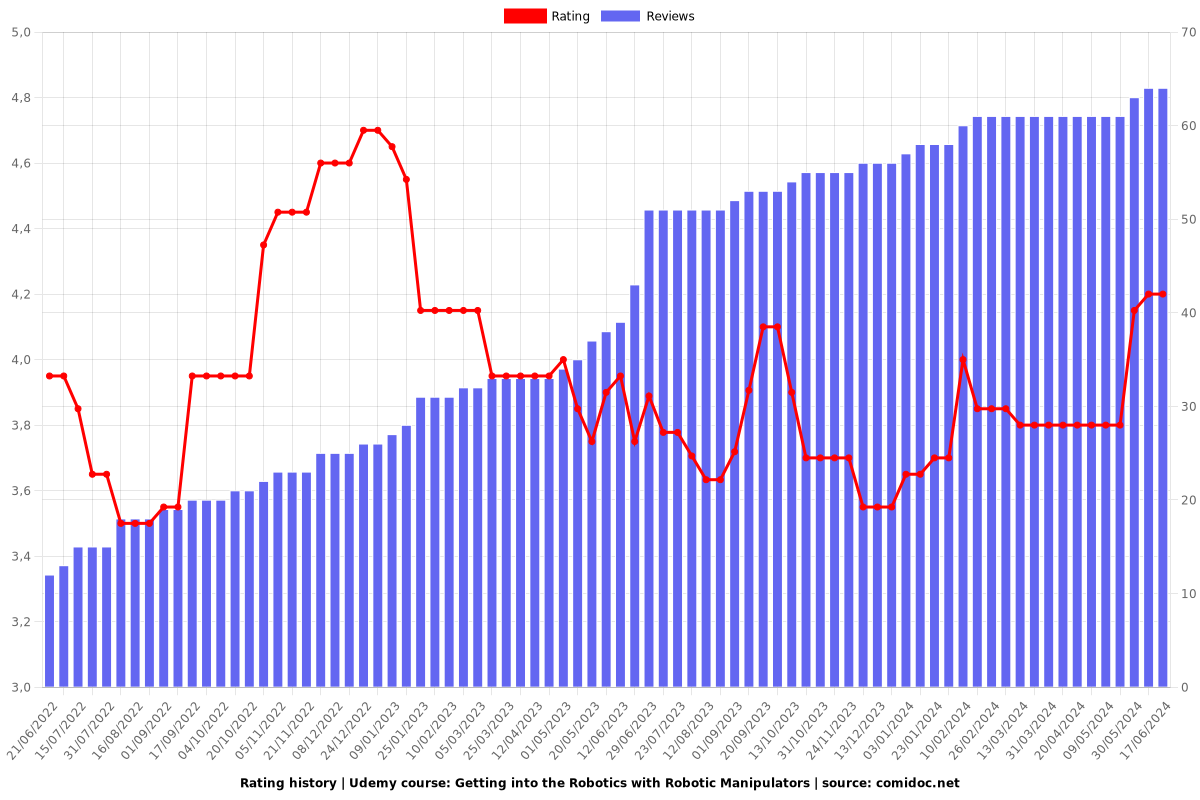
🏆 Course Review for [Course Name] **Overall Rating: 4.01 out of 5_
Introduction
The course under review offers a comprehensive exploration of low-level control systems, specifically designed for roboticists. The global rating of 4.01 indicates that it has received positive feedback from the audience, with recent reviews pointing out both strengths and areas for improvement.
Pros
- Structured Presentation Needed: A number of reviewers indicated that the course would benefit from a separate presentation on the commands of the toolbox before diving into coding, which would enhance understanding and organization.
- Comprehensive Overview: The course provides an in-depth overview of low-level control systems, offering valuable insights into the specifics of robotics that could be applied to real-world scenarios.
- Supplementary Materials Suggested: The suggestion to include attachments and additional blurb on core concepts from external resources and books reflects a desire for more in-depth explanations and support materials for learners.
- Content is Mathematically Solid: The course content is heavily mathematical, which may be well-suited for students who are familiar with the necessary math background.
- Easy-to-Understand Basic Concepts: The instructor has been praised for his ability to explain basic concepts, such as spatial transformations and the Denavit-Hartenberg (D-H) method, in an understandable manner.
Cons
- Pacing and Delivery: Some learners found the course to be too fast-paced and the instructor's voice was described as robotic, which may hinder comprehension for those not entirely familiar with the content.
- Advanced Topic Explanation Needed: Advanced topics, such as inverse kinematics, were not explained in a clear or concise manner. This could present difficulties for learners who require more detail to grasp complex ideas.
- Lack of Visual Aids for Algorithms: There was a demand for more visualization of control algorithms in MATLAB, suggesting that practical demonstrations would greatly enhance the learning experience.
- ** Connection to Real Entities Desired:** Some reviewers expressed a need for a stronger connection between the mathematical concepts and their application in real-world entities, feeling disconnected from the material.
Course Delivery
The course delivery appears to be highly focused on the mathematical foundations of control systems in robotics. While the content is undoubtedly comprehensive, there seems to be an opportunity for improvement in terms of explanatory pace and vocal tone to make the course more engaging and easier to follow. The desire for real-world application examples and interactive visual aids indicates that practical relevance and a clear connection between theory and practice can significantly improve the learning experience.
Recommendations
- Introduction to Toolbox Commands: Include a detailed introduction on the toolbox commands before moving into the course material.
- Supplementary Materials: Provide additional resources for learners to explore the core concepts further.
- Improved Pacing and Delivery: Adjust the pacing of the course and consider techniques to make the instructor's voice more engaging and human-like.
- Clear Explanation of Advanced Topics: Focus on enhancing the clarity and conciseness of explanations for advanced concepts like inverse kinematics.
- Practical Application and Visualization: Introduce practical applications with visual aids to help learners grasp the control algorithms in MATLAB more effectively.
By addressing these points, the course can likely improve its overall effectiveness and student satisfaction, making it an even more valuable resource for individuals looking to understand and apply control systems in robotics.
Charts
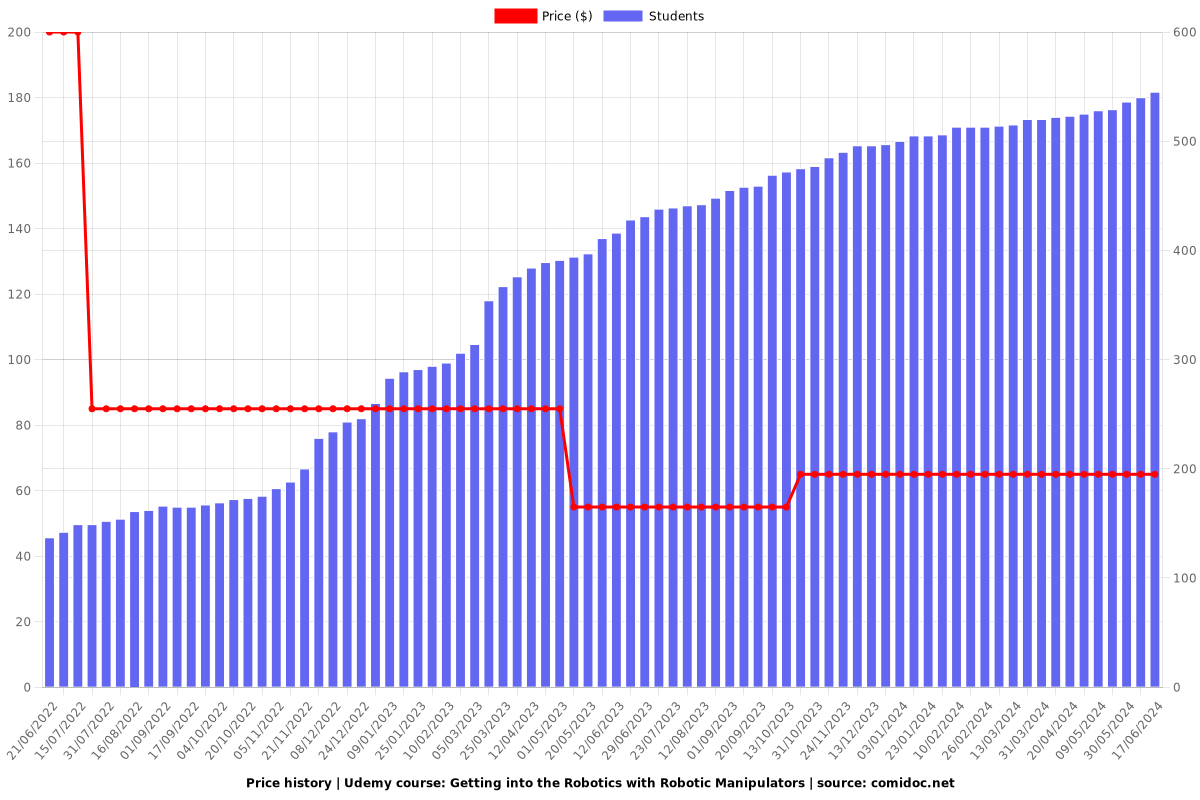
Price
Rating
Enrollment distribution