Data Fusion with Linear Kalman Filter
Theory and Implementation

What you will learn
How to probabilistically express uncertainty using probability distributions
How to convert differential systems into a state space representation
How to simulate and describe state space dynamic systems
How to use Least Squares Estimation to solve estimation problems
How to use the Linear Kalman Filter to solve optimal estimation problems
How to derive the system matrices for the Kalman Filter in general for any problem
How to optimally tune the Linear Kalman Filter for best performance
How to implement the Linear Kalman Filter in Python
Why take this course?
You need to learn know Data Fusion and Kalman Filtering!
The Kalman filter is one of the greatest discoveries in the history of estimation and data fusion theory, and perhaps one of the greatest engineering discoveries in the twentieth century. It has enabled mankind to do and build many things which could not be possible otherwise. It has immediate application in control of complex dynamic systems such as cars, aircraft, ships and spacecraft.
These concepts are used extensively in engineering and manufacturing but they are also used in many other areas such as chemistry, biology, finance, economics, and so on.
Why focus on Data Fusion and Kalman Filtering
Data Fusion is an amazing tool that is used pretty much in every modern piece of technology that involves any kind of sensing, measurement or automation.
The Kalman Filter is one of the most widely used methods for data fusion. By understanding this process you will more easily understand more complicated methods.
Difficult for beginners to comprehend how the filter works and how to apply the concepts in practice.
Evaluating and tuning the Kalman Filter for best performance can be a bit of a 'black art', we will give you tips and a structure so you know how to do this yourself.
So you don’t waste time trying to solve or debug problems that would be easily avoided with this knowledge! Become a Subject Matter Expert!
What you will learn:
You will learn the theory from ground up, so you can completely understand how it works and the implications things have on the end result. You will also learn practical implementation of the techniques, so you know how to put the theory into practice.
We will cover:
Basic Probability and Random Variables
Dynamic Systems and State Space Representations
Least Squares Estimation
Linear Kalman Filtering
Covers theory, implementation, use cases
Theory explanation and analysis using Python and Simulations
By the end of this course you will know:
How to probabilistically express uncertainty using probability distributions
How to convert differential systems into a state space representation
How to simulate and describe state space dynamic systems
How to use Least Squares Estimation to solve estimation problems
How to use the Linear Kalman Filter to solve optimal estimation problems
How to derive the system matrices for the Kalman Filter in general for any problem
How to optimally tune the Linear Kalman Filter for best performance
How to implement the Linear Kalman Filter in Python
Who is this course for:
University students or independent learners.
Working Engineers and Scientists.
Engineering professionals who wants to brush up on the math theory and skills related to Data Fusion and Kalman filtering.
Software Developers who wish to understand the basic concepts behind data fusion to aid in implementation or support of developing data fusion code.
Anyone already proficient with the math “in theory” and want to learn how to implement the theory in code.
So what are you waiting for??
Watch the course instruction video and free samples so that you can get an idea of what the course is like. If you think this course will help you then sign up, money back guarantee if this course is not right for you.
I hope to see you soon in the course!
Steve
Screenshots




Reviews
Charts
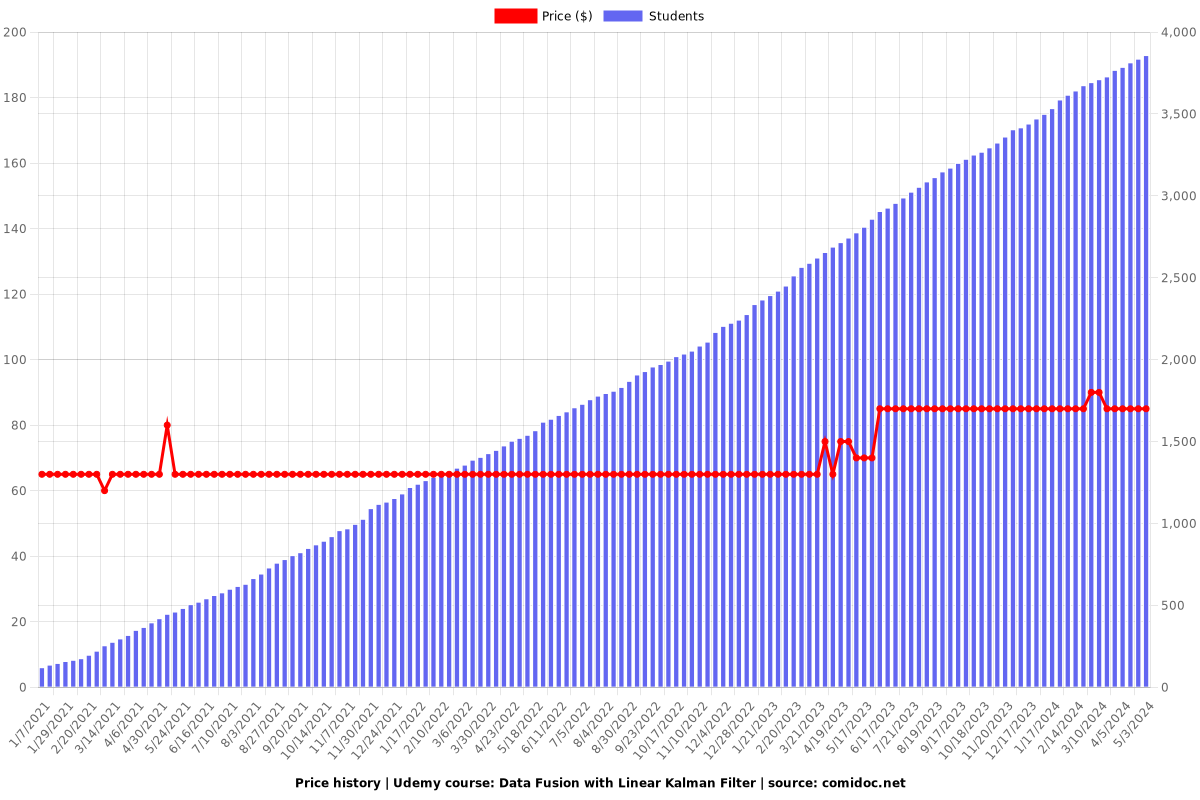
Price
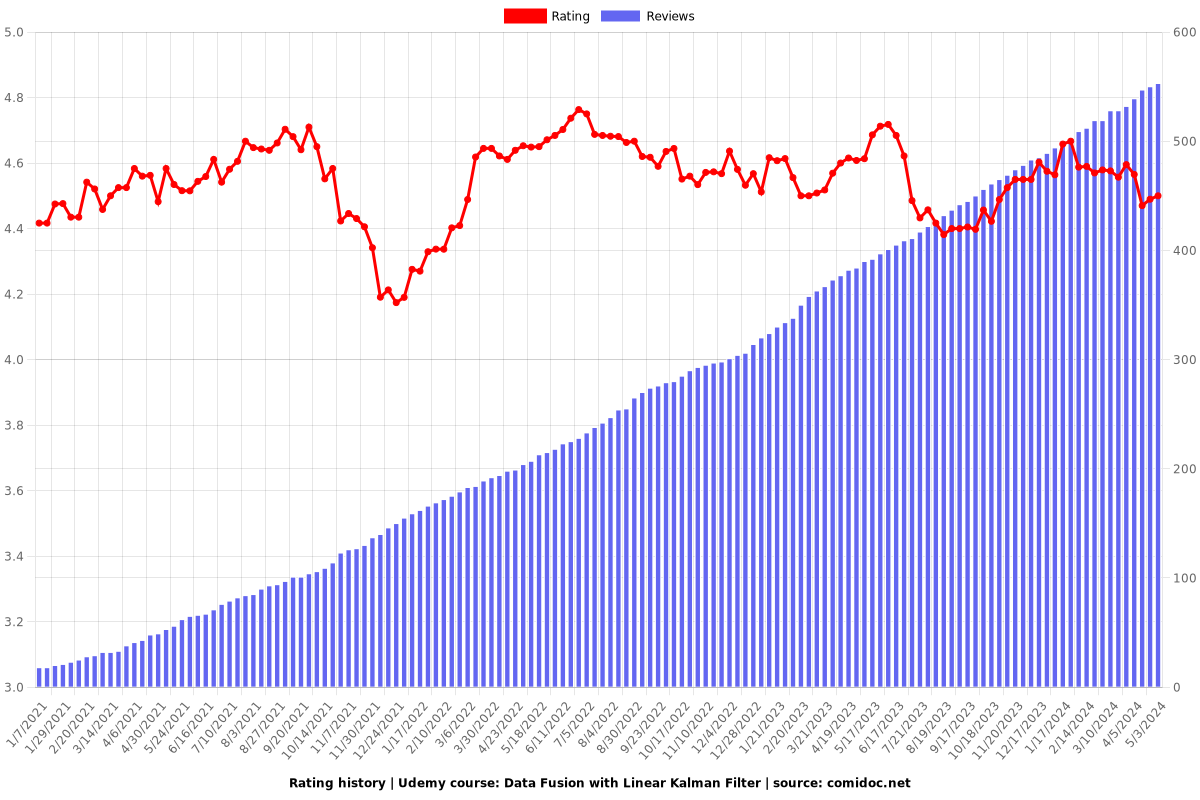
Rating
Enrollment distribution