Robot Antropomórfico: Modelamiento y Control Autónomo
Robótica con Matlab , Cinemática , Simulación 3D, Planificación de movimiento y Control

What you will learn
Modelamiento cinemático directo
Modelamiento cinemático diferencial directo
Modelamiento cinemático diferencial inverso
Jacobiano
Simulación de robots en Matlab con un simulador virtual 3D creado desde cero
Control de posición basado en Lyapunov
Control de seguimiento de trayectoria basado en Lyapunov
Control de seguimiento de camino basado en Lyapunov
Análisis de estabilidad de controladores por el método de Lyapunov
Saturación de velocidades
Control basado en espacio nulo
Singularidades en cinemática
Control de prevención de configuración singular
Why take this course?
¿Te gusta el grandioso mundo de la Robótica?
Entonces este curso es para ti!!!!
El curso empieza de manera gradual desde la revisión del principio de funcionamiento del robot, cinemática para determinar la posición del efector final con respecto a un sistema de referencia, el diseño de algoritmos de control basados en el modelo cinemático con diferentes estrategias para resolver los problemas fundamentales en el control movimiento, posición seguimiento de trayectoria y seguimiento de camino. Además se revisa en control basado en el espacio nulo con el objetivo de realizar tareas secundarias como la prevención de singularidades sin afectar las tareas primarias, esto gracias a los grados de libertad adicionales (Redundancia).
SECCIÓN 1: PRINCIPIO DE FUNCIONALMIENTO
En esta sección se incluyen la definición y el respectivo principio de funcionamiento de un robot manipulador de cuatro grados de libertad (4DOF), así como, cada uno de los grados de libertad que posee este robot.
SECCIÓN 2: MODELO CINEMÁTICO Y SIMULACIÓN
En esta sección se obtiene la velocidad y la posición del punto operacional (efector final) en función de las velocidades de los actuadores (motores) mediante la cinemática directa del robot. Específicamente revisaremos el modelo cinemático directo diferencial, jacobiano y modelos con diferentes grados de libertad hasta llegar a los 4DOF, todos los modelos serán puestos a prueba mediante simulación.
SECCIÓN 3: SIMULADOR 3D
En esta sección se muestra paso a paso como crear un novedoso simulador 3D diseñado en Matlab, muy fácil de utilizar y se puede usar los modelos 3D proporcionados en el área de recursos (archivos descargables) o si prefieres importar tus propios diseños 3D realizados en un software CAD como Sketchup, FreeCad, Solidworks. (Ojo en este curso no se muestra como diseñar el robot en los softwares mencionados, es decir, ya debe tener listo su diseño).
SECCIÓN 4: DISEÑO DE CONTROLADORES MEDIANTE LYAPUNOV
En esta sección el alumno aprenderá a diseñar algoritmos de control para resolver los problemas fundamentales de control de movimiento, posición, seguimiento de trayectoria y seguimiento de camino. Los algoritmos de control son diseñados desde cero mediante la teoría de Lyapunov. Además, se demuestra matemáticamente que los errores convergen asintóticamente a cero y finalmente para verificar el rendimiento, todos los controladores son testeados de manera simulada.
SECCIÓN 5: CONTROLADORES BASADOS EN EL ESPACIO NULO
En esta sección se implementa nuevos algoritmos de control para tareas segundarias como evasión de obstáculos, prevención de singularidades, minimización de consumo energía, entre otros sin afectar las tareas primarias (posición, seguimiento de trayectoria y camino). La tarea que vas a trabajar en esta sección es prevenir las configuraciones singulares mediante una postura fija que evite que las articulaciones se encuentren dentro de la vecindad de singularidad
Como bono, este curso incluye plantillas de código de Matlab que puedes descargar y usar en tus propios proyectos.
Una vez que adquiera el curso no solo estaré presente en los vídeos sino que también podrás preguntarme todas tus inquietudes acerca del curso.
Content
Introducción
Principio de funcionamiento
Modelo Cinemático
Simulador 3D
Controladores basados en la teoría de estabilidad de Lyapunov
Controladores basado en el espacio nulo
Screenshots




Reviews
Charts
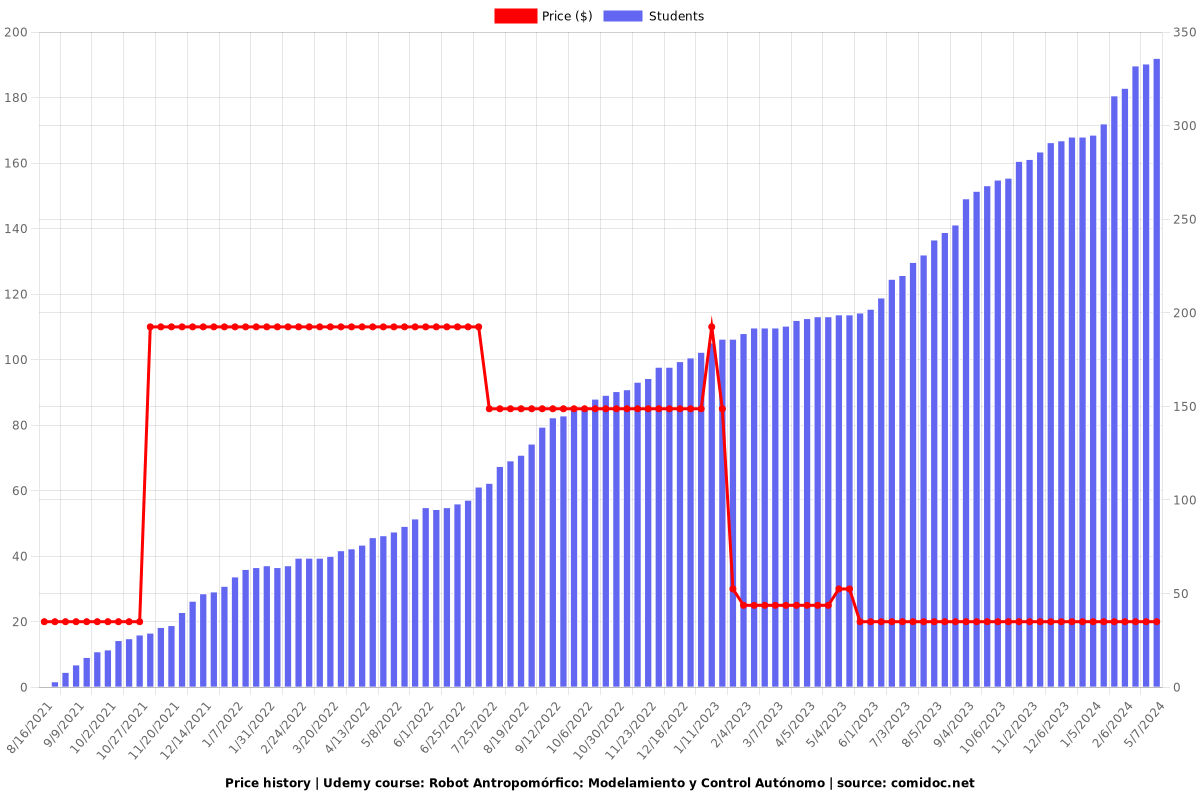
Price
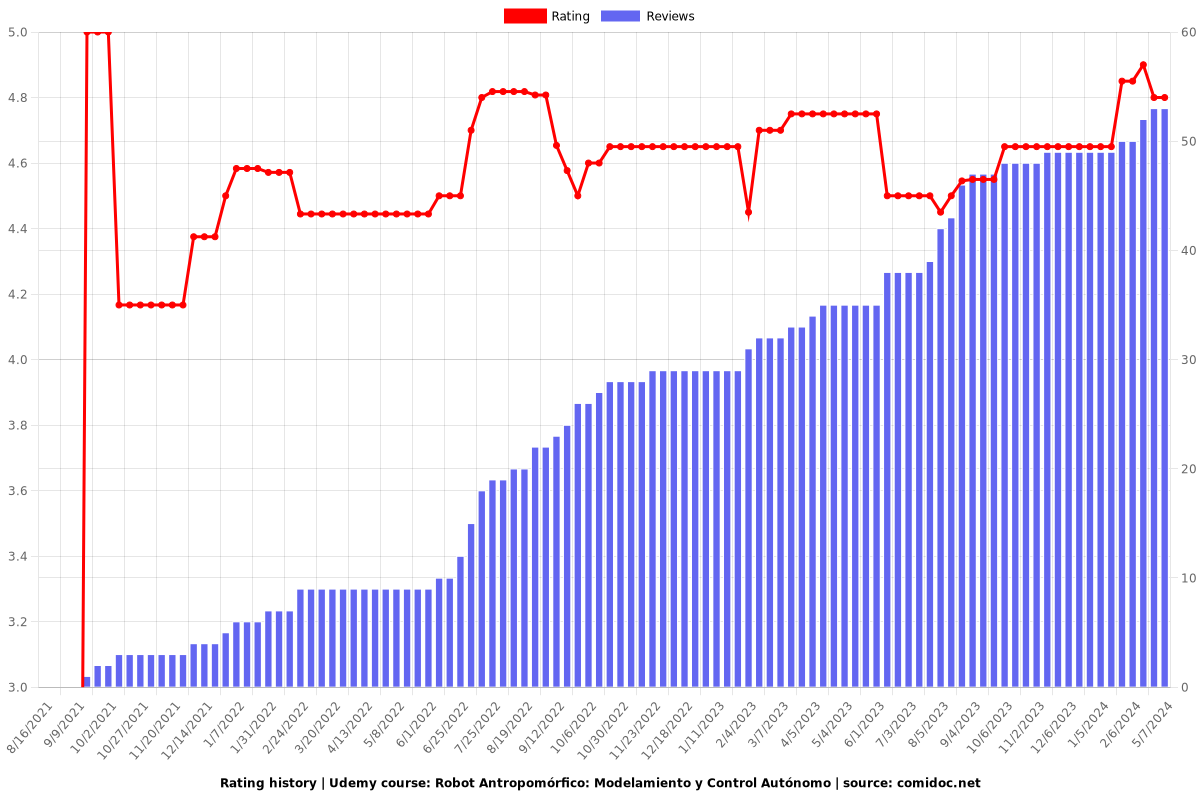
Rating
Enrollment distribution